研究内容
山本 透
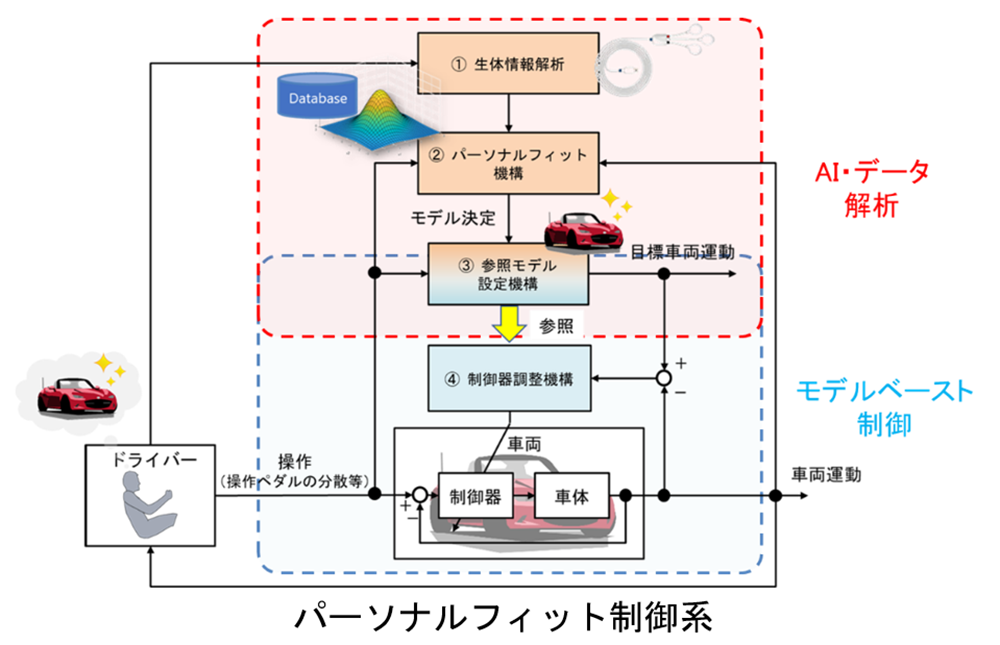
制御工学は,身の回りに存在する多くのシステムの効率化・自動化を可能にし,省エネルギーや省力化を通じてコスト削減やSDGsの達成にも貢献する,極めて実践的かつ社会的意義の大きい学問です。従来の制御系設計では,対象システムのモデルに基づいて入力を決定しますが,動作環境の変化によりシステム特性も変化するため,複数のモデルの構築と切り替えが必要となり,設計は非常に煩雑になります。この課題に対して,入出力データや動作条件,制御パラメータをデータベースに蓄積し,AIによる学習を通して,最適な制御パラメータを自動算出する「データベース駆動型制御法」を新しく開発しました。この手法は,過去の知見を活かしながら新たな環境にも柔軟に対応できることから,従来に比べて高精度かつ安定した制御を実現します。
現在,この技術は自動車,建設機械,射出成形プロセスなどへの応用に向けた実証実験が進められており,さらなる展開が期待されています。加えて,データベースに蓄積された情報は,制御のみならず故障予測や運用最適化といった領域にも応用可能であり,最終的にはこれらを統合し,対象とする実システムのあるフィジカル空間と膨大なデータから構成され目的に対応して機能するサイバー空間とを効率的に接続する「データベース駆動型サイバー・フィジカルシステム」の構築を目指しています。
企業の現場で生まれる実課題に基づきながら,制御技術の応用範囲を拡張し,社会実装可能な技術へと昇華させていくことが,研究の中心的なテーマとなっています。産業界との密接な協働を通じて新たな技術価値を創出し,社会に資するイノベーションへとつなげていくことを大切にしています。多数の企業と連携しながら進める研究開発の中で,研究室で生み出した制御アルゴリズムが実システムに実装された瞬間には,学生たちとともにその達成感を分かち合い,「ものが動く」感動と喜びを実感しています。制御の世界には,学理と実装が結びついた,深く面白い魅力が詰まっています。
【卒業研究テーマ】
・AIと制御の掛け合わせによるデジタルツイン(デジタルトリプレット)の構築
・制御性能評価機構を内包するデータベース駆動型制御システムの構築
・データ駆動型サイバー・フィジカルシステムの構築
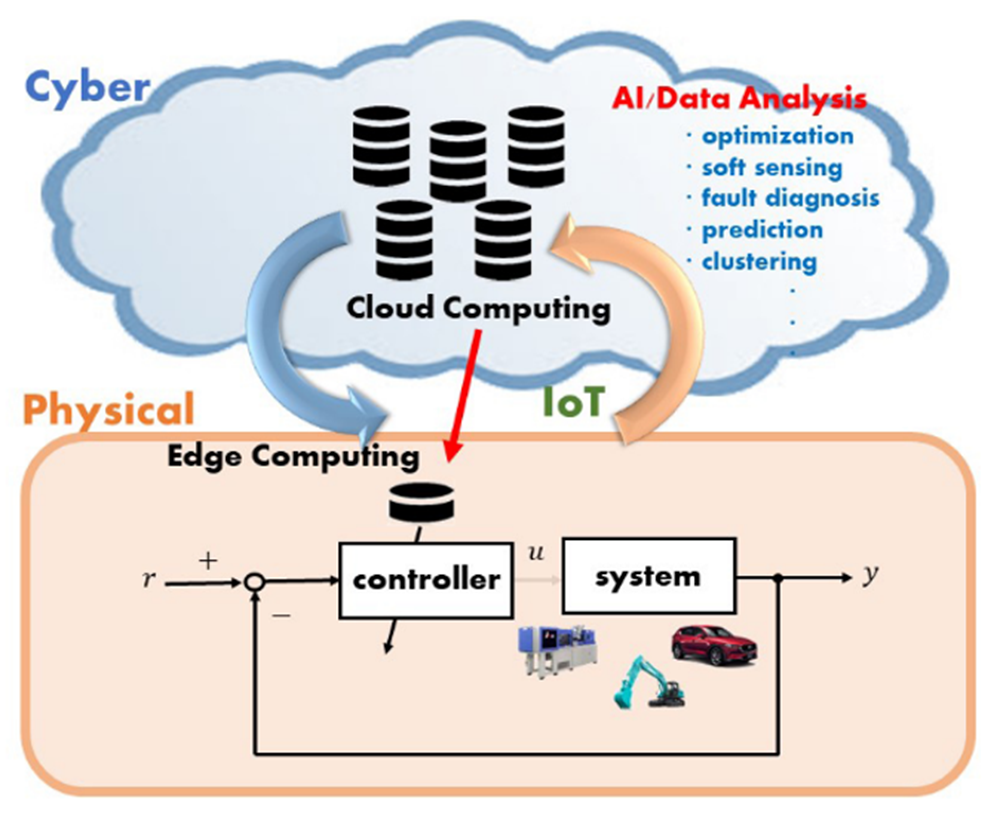
図 データベース駆動型サイバー・フィジカルシステム